
Introductie op project SIM0 (door docent Ronald Scheer)
In het eerste leerjaar van de opleiding Mechatronica werken studenten in groepjes aan projecten. Het allereerste project heet SIM0. Eerstejaars studenten Menno Hellings, Marnick Letmaath, Sven van der Wijst en Joost Willems vertellen in eigen woorden hoe zij dit hebben ervaren.
Over project SIM0 (door Menno, Marnick, Sven en Joost)
Hallo, wij zijn Menno Hellings, Marnick Letmaath, Sven van der Wijst en Joost Willems. Wij zijn eerstejaars studenten Mechatronica en wij vertellen graag over ons eerste gezamenlijke studieproject: SIM0.
Pingpongballetje van coördinaat A, via coördinaat B naar coördinaat C
Om op onze eerste lesdag al te horen te krijgen dat wij zonder ervaring aan een project moesten gaan werken kwam niet onverwachts. Wij hadden hier al van gehoord bij de open dagen. Het project was net als de vorige jaren dat wij een pingpongballetje van een coördinaat A, via een coördinaat B, naar coördinaat C moesten brengen op een geautomatiseerde wijze.
Het project zelf was erg interessant en geinig om aan te werken
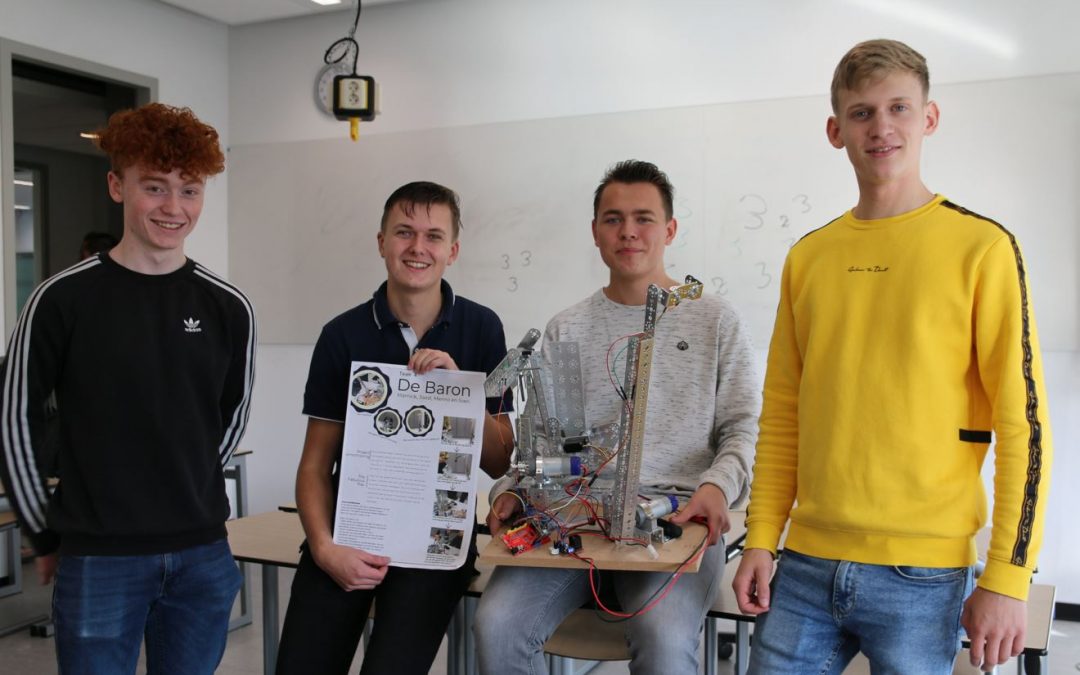
Zonder kennis van hoe iets zou kunnen moesten wij dus alles vanaf het begin leren. Door ons gewoon in het diepe te gooien hebben wij veel meer geleerd dan wat wij zouden kunnen leren door lessen te volgen. De eerste paar weken was vooral gericht op teambuilding met af en toe een klein onderzoek naar machines zoals bijvoorbeeld transportmachines. Pas rond de vierde week begonnen wij met het bedenken van onze prototypes, op basis van onze onderzoek naar verschillende machines. Met onze (11!) theoretische prototypes gingen wij verder kijken welke van deze prototypes op een realistische wijze door ons gemaakt zouden kunnen worden. In de vijfde week hebben wij 3 van deze prototypes gebouwd en getest. Uit deze tests hebben wij gekozen voor ons uiteindelijke project. Een robotarm die het balletje naar een lift gooit en vervolgens naar ons eindpunt takelt. Zie ook onze groepsfoto met het eindresultaat.
Keuze voor ons definitieve ontwerp
Onze keuze is gebaseerd op een aantal elementen. Ten eerste vonden wij onze keuze het leukste van de drie prototypes. Veel andere groepjes gebruikte een lopende band en wij wilde voorkomen dat elk groepje een lopende band gebruikt. Ten tweede zochten wij ook een uitdaging. Wij zitten namelijk niet op deze opleiding puur voor een diplomaatje, maar om er daadwerkelijk iets van te leren. Door onszelf uit te dagen hebben wij veel meer geleerd dan wanneer wij een makkelijk project in elkaar zouden zetten voor een paar studiepuntjes. Als laatste past ons idee het beste bij onze coördinaten. Wij moesten van heel hoog, naar bijna de bodem en vervolgens weer omhoog.
Gewijzigd eind-concept
Met ons eindconcept zijn wij verder aan de slag gegaan en hebben wij in de zesde week een groot deel van ons project afgemaakt. In de zevende week kregen wij te horen dat ons project uiteindelijk met alle andere groepjes uit onze klas aan elkaar moesten komen. We gingen dus met alle project groepen 1 grote machine bouwen. Super vet natuurlijk! Dit hoorde eigenlijk een verassing te zijn, maar wij hebben het via groepjes van vorig jaar gehoord (al voordat het dit jaar aangekondigd werd) en dus waren wij hier al op voorbereid. Uiteindelijk hebben wij ontdekt hoe alle platen aan elkaar zouden moeten komen en wij hebben met andere groepjes samen kunnen werken. Wat erg interessant was. Hier kregen wij te zien hoe andere groepjes het project hadden gemaakt.
Taakverdeling
Voor project SIM0 hebben Marnick Letmaath en Sven van der Wijst zich vooral beziggehouden met het programmeren van de Arduino. Voor ons beide was dit een grote uitdaging aangezien wij ons nog nooit bezig hebben gehouden met Arduino. Het leerproces was dan ook vooral fouten maken en deze oplossen.
Aansturing twee motoren, één servo, een lichtsensor en een led lampje
Uiteindelijk hebben wij een stukje code geschreven voor het laten werken van twee motoren, één servo, een lichtsensor en een led lampje. Vooral bij de motoren ging het mis, dit is ook waar wij ons proces zijn begonnen. Zo hebben wij een paar deuken in de tafel achtergelaten toen de motor op een te hoge snelheid een ‘arm’ de verkeerde richting op sloeg.
Programmeren met Arduino
Het programmeren deden wij aan de hand van een arduino kit die te halen is bij ons op school. Deze kit bestaat uit allerlei handige componenten zoals, weerstanden, ledlampen, een arduino nano, kabels, sensoren etc. Deze kit werkte voor ons perfect aangezien we ook niet meer nodig hadden dan was meegeleverd. Wij hebben in dit project veel geleerd omtrent programmeren en wij zijn blij met wat wij uiteindelijk hebben neergezet.
Over frame onderdelen en elektromotoren
We kregen een kit met veel verschillende soorten onderdelen, van frame onderdelen tot elektromotoren. We moesten de machine binnen een bepaalde afmeting houden.
Beschrijving van onze machine
Stap 1
Het pingpong balletje begint op de draaiende arm en wordt door een elektromotor (die de arm aanstuurt) gedraaid op een draaipunt, zodat de arm ‘zwiert’ en het balletje gooit, We hebben de arm zodanig afgesteld (qua snelheid en lengte) dat het balletje perfect terecht komt in het bakje van onze lift.
Stap 2
Wanneer het balletje in de lift ligt wordt de lift omhoog getakeld door een touwtje dat aan de lift verbonden zit met een elektromotor. Het balletje wordt bovenaan de lift dan weer door een servo met een arm uit de lift geduwd. En zo bereikt het balletje het eindpunt waar dan een lichtje aan gaat. Het balletje gaat gedurende deze rit door 3 verschillende coördinaten. Punt A, B en C. Dit waren de vooraf bepaalde coördinaten waar wij de machine omheen moesten bouwen.
Het hele systeem is geautomatiseerd
De machine begint met werken wanneer het balletje in de arm op punt A ligt. Er zit een licht-sensor onder de arm waardoor de machine geactiveerd wordt wanneer het balletje ervoor ligt. De lift staat op een timer en begint met takelen na 5 seconden. Bovenaan gaat de servo ook op een timer. Het lichtje aan het einde gaat ook aan door een sensor. Door deze verschillende manieren hebben wij onze machine te weten automatiseren.
Afsluitend
In het kort was dit dus een erg intrigerend, leerzaam en simpelweg een leuk project om aan te werken. Wij vinden zelf dat, in deze 8 weken, wij een heel mooi project neer hebben gezet en zijn daardoor dus zeer trots erop.

 Vind ik leuk
Vind ik leuk
Over Ronald Scheer
Ronald Scheer is an educator based at Fontys University of Applied Sciences in Eindhoven. Ronald is deeply engaged in the field of Engineering and is associated with the Robotics & Mechatronics professorship. In addition to his teaching role, he wears the hat of a skilled video and podcast creator within the professorship. Beyond the classroom, Ronald extends his expertise to assist fellow educators in crafting engaging learning materials for both online and classroom activities. His passion lies in enhancing the educational experience through multimedia content creation and innovative teaching methodologies.
- Web |
- More Posts(156)